Jean-Marc Laframboise, Senior Technical Advisor, is proud to be involved with this project and to mentor another generation of future Engineers.
May 04, 2022

Jean-Marc Laframboise, Senior Technical Advisor, is proud to be involved with this project and to mentor another generation of future Engineers.
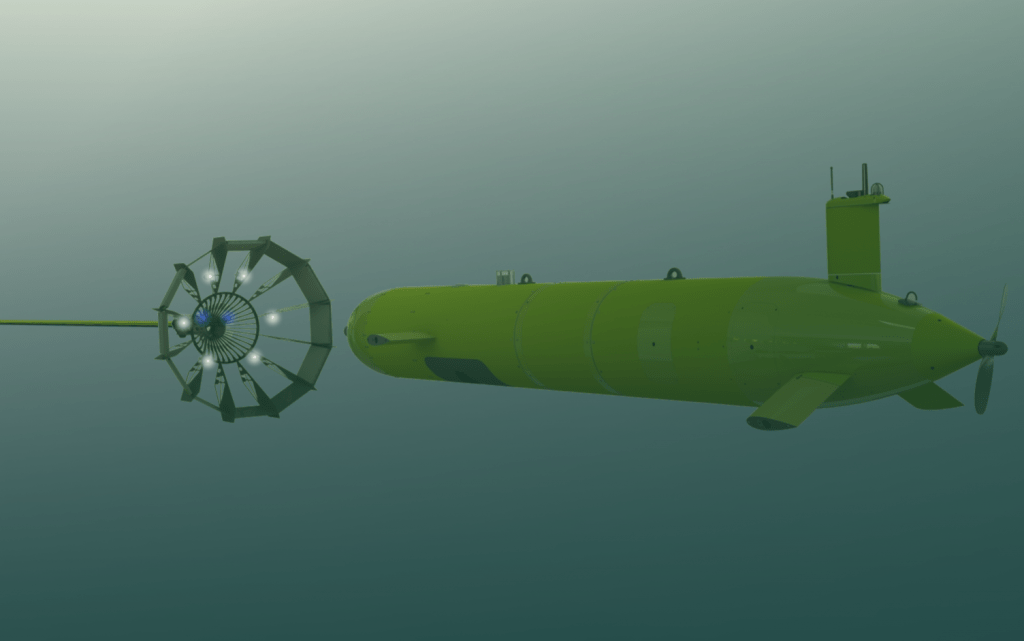
The atmosphere on the bridge of ISE’s vessel Researcher is tense. All mission checks are complete; conditions are optimum for docking; everything looks good. The vehicle, a 5-meter-long Autonomous Underwater Vehicle (or AUV), is on mission underwater. Updates from the AUV are now limited to acoustic chirps every 30 seconds and everyone is waiting anxiously. Will it succeed?
Whenever an AUV is sent underwater to test new systems it is an exciting time, and for the ISE team onboard Researcher this feeling is nothing new. On this occasion, they were testing the results of their year-long autonomous docking development. The project, funded by Canadian Innovation for Defence Excellence and Security (IDEaS), utilised both vision and acoustic-based systems to locate, track, and home in on a towed docking station. In this article we will explain the benefits and challenges and how ISE overcame them, as well as looking at the next steps for this project.
AUVs are incredible platforms for collecting subsea data without human intervention. One of their drawbacks, however, is that they still need a support ship to recover them for data download and battery charging. AUVs, like ISE’s Explorer, are on the larger side to allow for longer duration and the integration of higher quality and power-hungry sonar systems. This can make the proposition of recovery even more daunting in heavy seas. It is an added risk for the operators, the operation and the AUV itself. With the ability to dock subsea, mission duration can be increased by allowing operators to recharge and retask the AUV without having to risk potentially dangerous recoveries.
Typically, the AUV deploys a float and line that is used by the operators to bring the AUV closer to the ship. This can be very challenging in harsh seas and there is a risk of the line fouling with the AUV control planes and thruster. Once close enough, the AUV has to mate with a ship that is often pitching and rolling. This stage is extremely dangerous as the recovery infrastructure can easily end up impacting the AUV. As the waves get bigger, so do the dangers.
With subsea docking that AUV can make the connection with the ship infrastructure beneath the waves. This increases mission endurance by allowing operators to recharge and retask the vehicle without having to risk these potentially dangerous recoveries.
There is also an additional benefit: if the docking can be autonomous it can be solely supported by a large Uncrewed Surface Vessel (USV). This radically changes the AUV’s mission capability and by removing a crewed surface ship, the costs are significantly reduced. With the AUV and USV paired like this their mission endurance can be measured in weeks – not hours – and they can both be launched from shore.
IDEaS has a keen interest in persistent maritime surveillance; the Department of National Defense want to know what is entering their waters. As there is such a vast Canadian coastline needing to be monitored, new thinking is required to find the best solution. Having a USV and AUV working together could be it.
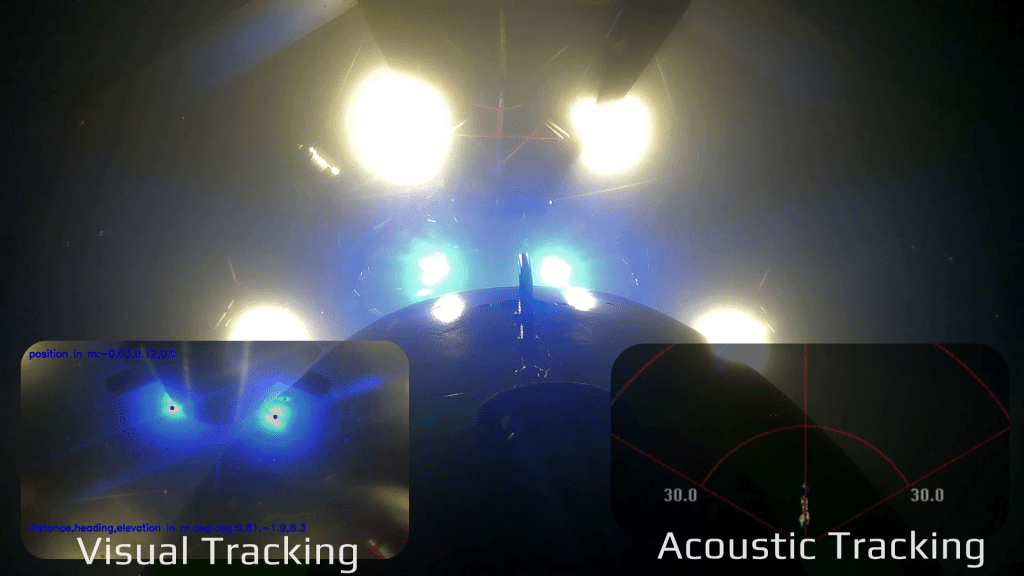
“Range 26 meters. On acoustics.” Jason, one of ISE’s electrical engineers, breaks the silence on the bridge of Researcher. He has just received the first data packet from the AUV. It has successfully acquired the dock’s acoustic signature using its forward looking multibeam echosounder. This is nothing new for the project, and at this point the AUV has repeatedly completed this stage of its mission at ranges up to 100 meters as part of ISE’s testing plan. That said, it is still a big milestone. It means that the AUV has filtered out the strong acoustic returns in its field of view and has identified one that meets the criteria and has adjusted its heading to approach. It must be able to do this on its own as communication with the surface is so limited.
“Range 8 meters. It’s switched to visual tracking.” Jason again reads data from the AUV at the next important milestone. The AUV has assessed that the quality of visual tracking is good enough to switch away from acoustic tracking. It can now see the light array on the dock and is using it to calculate the dock relative position, speed, and attitude. This capability took months to develop using techniques such as computational neural networks to train the vehicle to recognise the LEDs and array being used.
When deciding on the dock design, ISE opted to make it as simple and as passive as possible, taking a similar approach to aircraft in-flight refueling. The reason being that the AUV is already a very capable and maneuverable vehicle. Designing a complex system that required a pilot to aid the docking process wasn’t in the spirit of what they were trying to achieve.
The resulting dock was designed to be a stable platform with a half meter target cone. As long as the AUV impacts within this cone, the dock will self-align and aid the process. It was also designed with a two-part tow cable to help decouple the dock movement from the surface waves.
“Range 3.5 meters. We’re on 380.” Back on Researcher, Jason breaks the building tension yet again with the next big event. ‘380’ is the name for the section of the mission where the AUV attempts its final closing stage. It has evaluated that the conditions are good and switched to the next stage. In this phase there are several safety features designed to minimise risk of damage to the AUV and dock. If the vehicle has not received a signal that it has latched within a certain time frame, if it travels over a certain distance, or loses tracking on the LEDs, it will automatically switch to the abort phase of the mission so that it can back away and try again later. These abort conditions were considered at great length by the team at ISE, as trying to hit something with the AUV is the opposite of what they normally intend to do.
Everyone on the bridge is now anxiously waiting for the next update. They’ve double and triple-checked everything. On previous days, the AUV had completed every part of the mission except this final one, will it succeed? The next update arrives: “We have telemetry, and we’re docked!” It made it!
Although the sense of achievement was felt by the whole ISE team, they weren’t content with docking just once. They wanted to accomplish this repeatedly over several days and gather data on the system performance. This feedback would not only help to inform the next stage design decisions but would prove that the first success wasn’t just luck. Over the next few days, the AUV successfully docked five more times, giving the team plenty of data to work with.
Now ISE has completed this stage of the project there are many options for continued development. Various lessons were learned during these sea trials – as is always the case with prototypes. For example, the dock can be made smaller and simpler to launch and the tracking algorithms can be improved to make them more robust.
For this project ISE focused solely on docking as this was what they identified as the gap in the market. This capability has many benefits and possibilities as previously mentioned. However, if the system were also able to recover the AUV that would open up even more possibilities, especially as more offshore work moves to utilising robotic systems operated from shore.
Whatever the final system looks like, its clear that there is a lot of potential to improve our current subsea survey operations.
Over a two-week period in late 2020 in the protected waters of Vancouver, Canada, International Submarine Engineering Ltd (ISE) tested its prototype of an underwater dock. The dock is a platform for autonomous underwater vehicles (AUVs) to upload data and re-charge their onboard batteries all while staying submerged. Setting aside the technical achievement, in this article we’re going to discuss why this is important and what this means for general AUV operations as well as with regard to maritime surveillance.
Monitoring and mapping the waterways has always been a priority for sea-faring nations. Whether it be for defence purposes or for scientific research, understanding these places has been critical for success to the civilizations that surround them. The knowledge of ones own coast includes the ability to defend against foreign entities before they have the chance to do harm. This is best achieved by using preventative measures such as constant monitoring of the coastal waters.
Currently this monitoring is done in a variety of ways, the two most common being the use of fixed systems such as hydrophone arrays and secondly, ship-based monitoring, of course both have their pros and cons. In a nutshell, fixed systems are easy to deploy and can monitor continuously as long as they have shore power of some sort. The catch is that they require shore power, meaning they need a power grid to stay continuously on. Furthermore, as they name implies, they are fixed, so if someone knew of their location, they can easily be avoided.
Ship based systems are mobile, and that is their greatest asset. Also, every major coastal country has some form of navy which of course would possess some ships. Adding some sensors or even some marine robotics to an already existing infrastructure is fairly simple. Conversely, ships are costly to operate and also they are easy to spot; therefor, minimizing some of the desired requirements in coastal surveillance.
AUVs are increasingly becoming more common in their use as survey and subsea monitoring vehicles. They can have high quality sonar systems installed on them and can operate a lot closer to the survey target than the surface ship can. Furthermore, they are much quieter than a ship which would allow hydro-acoustic systems to perform much better. The main downside of AUVs has always been the energy capacity that they are able to carry. An AUV can only travel so far on a single charge, and this has generally meant missions under twenty-four hours duration. Once the energy is depleted the AUV must be recovered so the data can be downloaded, and the batteries recharged. The physical act of launching and recovering an AUV off of a support vessel for this purpose is often regarded as the point of the mission with the highest likelihood of failure. Adverse weather conditions further increase the risk of failure and can lead to damage to the assets or the personnel involved. Underwater is where an AUV is designed to operate and it is there that it is safest.
In water docking eliminates the need for launch and recovery onto a ship or surface platform. Simply put, when the AUV runs low on energy, it will autonomously navigate itself to the subsea dock where it latches to be charged and have its data offloaded. This can all be done regardless of the weather at the surface. With the ability to charge AUVs on the fly, (much in the same way that an air force refuels their planes while in flight), continuous subsea AUV missions can be achieved. This is a step forward in subsea surveillance and is a significant force multiplier to ones defence strategies.

The ability to charge an AUV on the fly also changes the approach that one could take with their AUV fleet. Currently AUVs are increasingly getting bigger so that they can handle more batteries; this is all done with the goal to increase mission durations. By adding the ability to recharge oneself during a mission, energy capacity onboard an AUV is less critical and smaller battery banks can now be used. This would mean that smaller AUVs can be utilized which of course would mean less costly AUVs.
One step further, consider the idea of replacing one large surveillance AUV with several smaller AUVs that can recharge on the fly and thus achieve continuous monitoring. This is a big step with regard to surveillance.
The next big question with the dock must be, what is the dock attached too? Will it be towed or will it be fixed? There is much flexibility with this question because of the very nature of what the dock is. Towing the dock can be done using either a ship or an autonomous surface vessel (ASV). Both have the ability to provide power down the line to the dock as well as providing a surface support station to upload the data too.
With the technological gains that AUVs have made in the last few decades, so have ASVs. It is little wonder that they are the future for surface vessels as they are cheaper to operate and can navigate in harsher climates without the downside of endangering a crew. Pairing an AUV or even a fleet of AUVs with an ASV is a perfect match as ASVs are ideally suited to play a part in persistent maritime surveillance. The ASV can tow the dock along a coastline for example, all the while the AUV is doing its survey. As needed, the AUV can then find the dock to recharge and upload its latest data.
While a mobile dock is very versatile, the use of a subsea fixed dock platform might better suit some applications. The idea is to fix the dock in one location that the vehicle would again return to as needed to charge or upload data. In this configuration the dock can be wired directly to shore power but also hidden because it would never have the need to surface. This could possibly be best suited for areas where constant monitoring is important such as around a port or along popular shipping routes.
Aside from defence strategies, the constant monitoring can also be a great asset to the science community for the same reason, persistent surveillance. Current scientific stations are, for the most part, fixed systems. While these have many benefits, they can only collect data on points of interest that are in close proximity to the sensor. A mobile platform has the obvious advantage of scanning larger areas. In the past this may have been too costly for private institutions to afford as it may typically need a support ship, crew and a way to launch and recover the AUV. With a permanent dock, there is no longer a need for daily support thus reducing the cost of the surveillance.
Persistent subsea maritime surveillance is an important key to ensuring a safe coastline and can add valuable data to the science community. AUVs have proven to be very effective in gathering this data in a costly and timely manner. Of course they have had their limitations, with the greatest challenges attributed to their battery range and launching and recovery of the vehicle. The dock provides a forward-thinking solution as it eliminates the need for constant launching and recovering of the vehicle by providing an in-water power charging and data transfer station.
Find out more about ISE’s docking project here: https://ise.bc.ca/product/dock/
This article was written by Dougles Ramsay of ISE and was originally posted on ROV Planet:
https://www.rovplanet.com/rov-planet-magazine-issue-26-is-out-now-26-02-2021
Local sea trials using DRDC’s MCM DORADO Semi-Submersible prove successful for Dalhousie University