Autonomous Docking
Discover Unlimited Range: Surfacing Optional
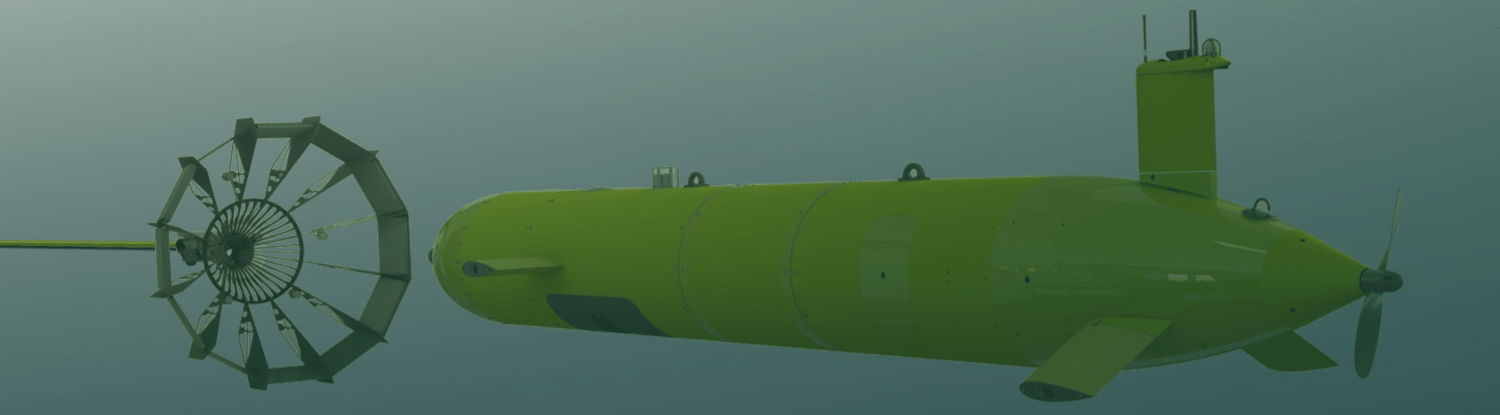
ISE has been developing a towed docking system to allow its Explorer class AUV to autonomously dock for charging and data download. This towed system allows for docking at a depth that minimises the affect of wave effects making the docking process smoother and more reliable.
This project is a joint project between ISE and Dalhousie University with funding provided by Innovation for Defence Excellence and Security (IDEaS) with the goal to use the dock for the purpose of persistent maritime surveillance. Read about the most recent phase of this project here. Read more about the planned dock features here.
This project is still in development, however this page will be updated with all the latest information about the development.
CONTACT US TODAYSurface Docking
The first part of our testing for this project was to test the towed dock on the surface to ensure that the AUV could latch successfully in water. This video shows the result of one of these tests.

Tracking
The second part of our testing was to run missions where the AUV dove and acquired the dock with acoustic tracking. It then closed to approximately 10 meters before autonomously switching to visual tracking before final approach. For these missions, the AUV held at a range of 5m while we fine tuned the target tracking and AUV control algorithms. This video shows one of these cycles.
Final Docking
The final part in our testing was to repeatedly test the performance of the dock by completing multiple cycles. During the final stages of the trials the AUV successfully docked multiple times and this video shows one of those docking runs.